 エンジニア
エンジニア 機械学習のPCを自作してみた!(パーツ予算15~20万円編)
機械学習・ディープラーニング用のPCを自作してみました。パーツの予算総額は約15~20万円のミドルスペックです。機械学習で重要なGPUメモリを重視して、デスクトップPCを組んだ内容を紹介します。
エンジニア  Zephyr
Zephyr  Zephyr
Zephyr 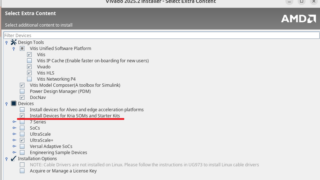 FPGA
FPGA  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  ラズベリーパイ(raspberry pi)
ラズベリーパイ(raspberry pi)  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr Zephyr
Zephyr Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  ハードウェア
ハードウェア  Zephyr
Zephyr  Zephyr
Zephyr  Zephyr
Zephyr  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE