 Zephyr
Zephyr Zephyr Project meetup: Osakaで発表してきた
Zephyr Project meetup: Osakaで発表してきました。発表テーマは「Zephyr(RTOS)にEdge AIを組み込んでみた話」+デモです。当日のカンファレンスから懇親会までの様子を紹介します。Zephyr Proje...
Zephyr 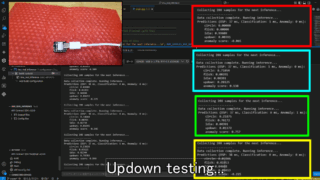 Zephyr
Zephyr 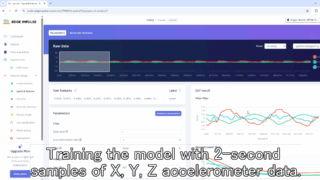 Zephyr
Zephyr  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  エンジニア
エンジニア  Bluetooth LE
Bluetooth LE 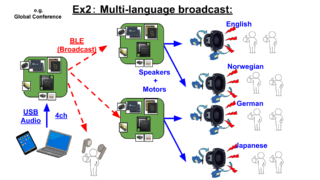 Bluetooth LE
Bluetooth LE 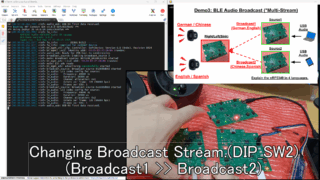 Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  エンジニア
エンジニア  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE 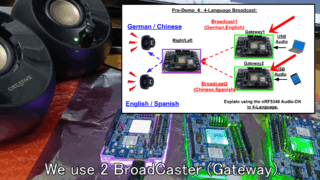 Bluetooth LE
Bluetooth LE 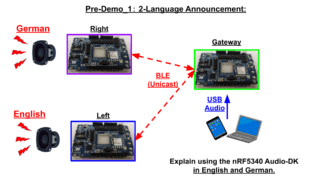 Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE  Bluetooth LE
Bluetooth LE