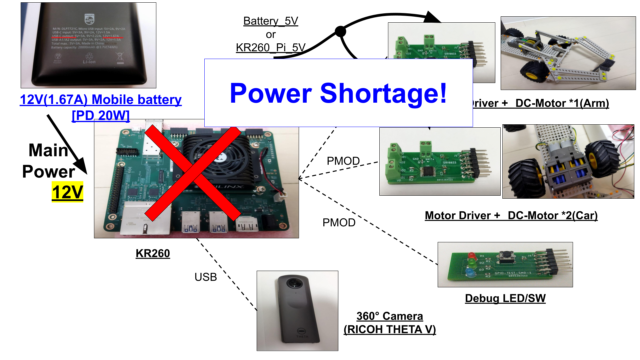
バッテリーからKR260のロボットを動かそうとすると、起動時に電力不足が発生しました。
市販のPD対応のモバイルバッテリー(20W)を使いました。
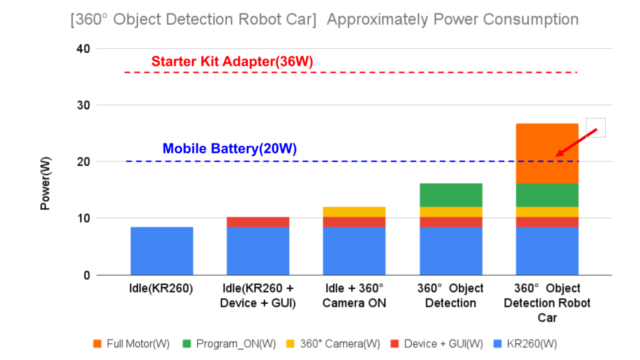
実際の消費電力を積み上げて、どれぐらい不足していたのか確認してみます。
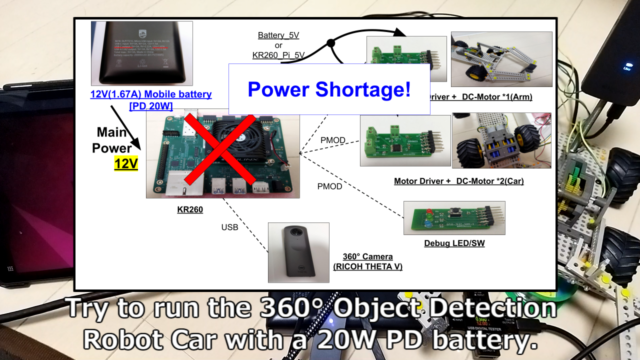
PDのモバイルバッテリーをロボットの12V電源代わりにした話
KR260をモバイルバッテリーから動かそうとすると、DPU起動時に電力不足が発生しました。
最初の計画では、バッテリーからKR260を搭載したロボットを動作させる予定でした。
(そのため、メインプロジェクトでは標準のACアダプタから電源供給しています)
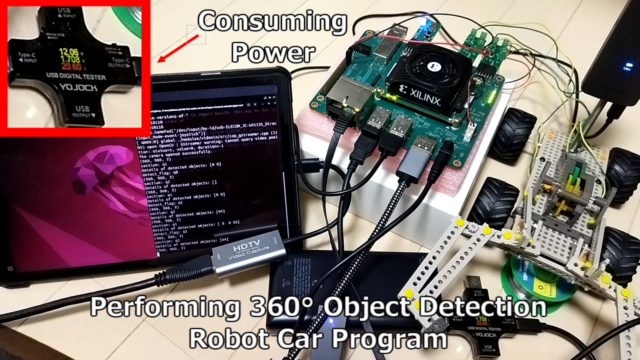
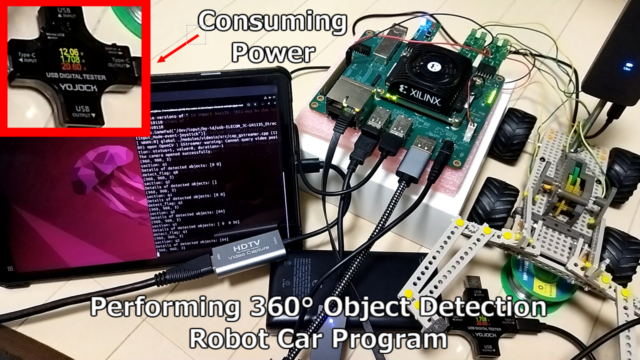
実際に電力不足が起きたテスト動画が下記です。
KR260の起動時、立ち上げは問題なくバッテリーから電力供給できています。
ただし、DPUのオーバレイを読み込むところでシャットダウンしていることが分かります
実際の消費電力を積み上げると、やはり20Wのバッテリーでは不足していました。
消費電力の詳細に関して紹介していきます。

モバイルバッテリーPD20WでKR260を動かす
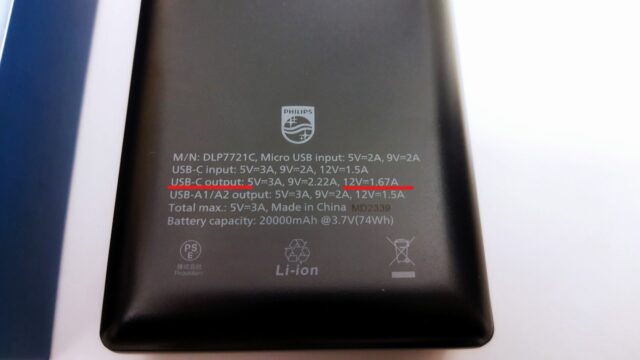
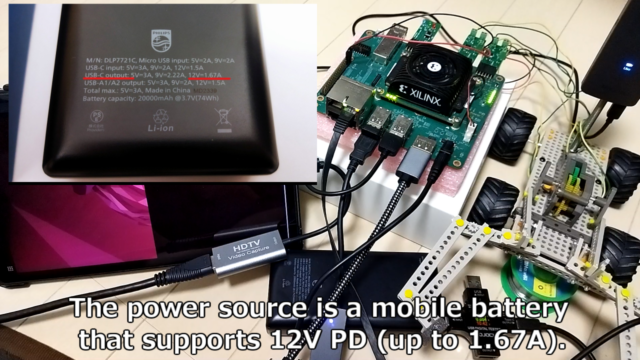
PD対応の12V出力が可能なモバイルバッテリーを用意しました。
Philips (フィリップス)のDLP7721Cです。スペックとしてはPD20Wで下記です。
20W以上だとコストも大分高くなるので、筆者は20W品を購入しました。(※2024年時点)
【出力】USB-A1/A2:DC 5V/3A,9V/2A,12V/1.5A
USB-C:DC 5V/3A,9V/2.2A,12V/1.67A
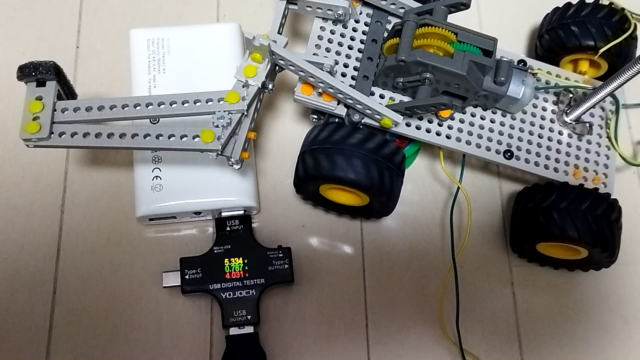
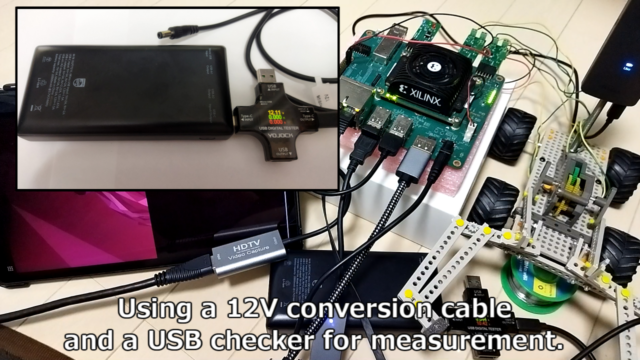
TypeCの電流チェッカーはAmazonで販売されている、汎用品のものです。
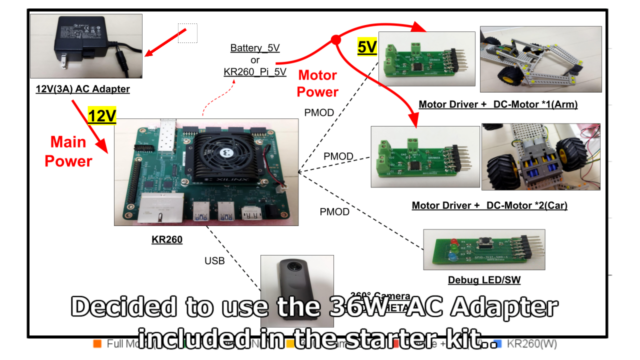
KR260のDCジャックに12V電源入力できるように、PD12V出力対応のケーブルも購入しました。

Idle時の消費電流
KR260の起動はモバイルバッテリでも問題ありません。
ブート含めてLinuxも正常に立ち上がります。
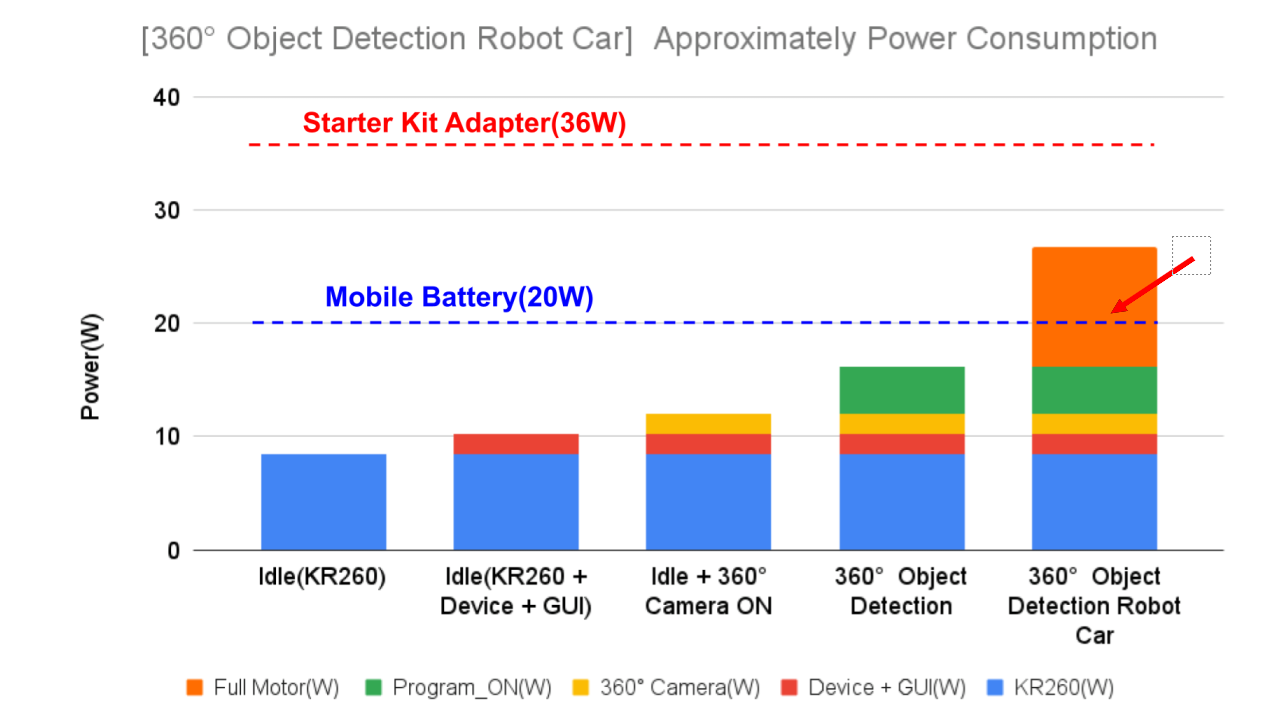
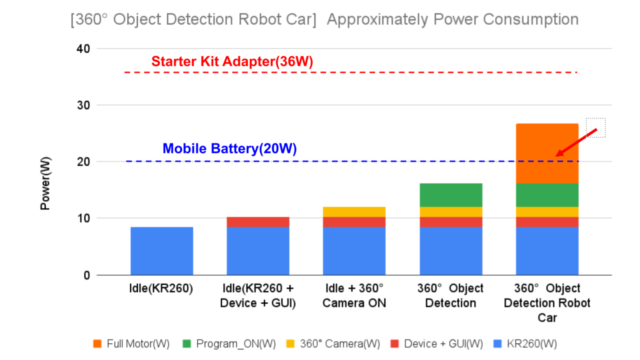
DCジャックを差し込んでからのIdle時は約8.4W(12V_700mA)でした。

デバイス接続+GUIの消費電流
USBキーボードやマウス、またディスプレイ接続時は約10.2W(12V_850mA)でした。

360°カメラ接続時の消費電流
360°カメラ接続時の消費電流は約12.0W(12V_1000mA)でした。

360°物体検出時の消費電流
DPUを動かして、360°物体検出時の消費電流は約16.2W(12V_1350mA)でした。
この時点までは、20Wのモバイルバッテリでも動作できていました。

モータの消費電流
今回のロボットには合計3個のDCモータを使用しています。
アーム制御用に1個、またロボットカー制御用として2個のDCモータを使っています。
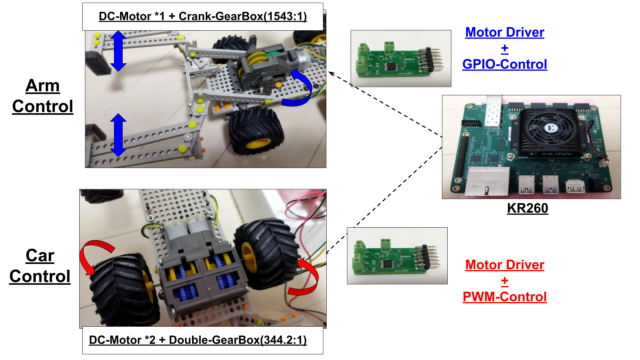
モータ電源としては5Vを使っています。
但し、KR260からPWM制御していますので、常に100%で動作させているわけはありません。
ただ今回は測定の都合上、100%で動かしている消費電流で見積もりました。
アームのDCモータ1個の100%駆動時は約2.5W(5V_500mA)でした。

ロボットカーのDCモータ1個の100%駆動時は約4W(5V_800mA)でした。
よって全部のモータ駆動する場合、2.5W+4W*2=10.5Wの消費電力見積りとしました。
(実際には、3個まとめて動作するケースは少ないですが…)
KR260で電力不足でリブートするテスト
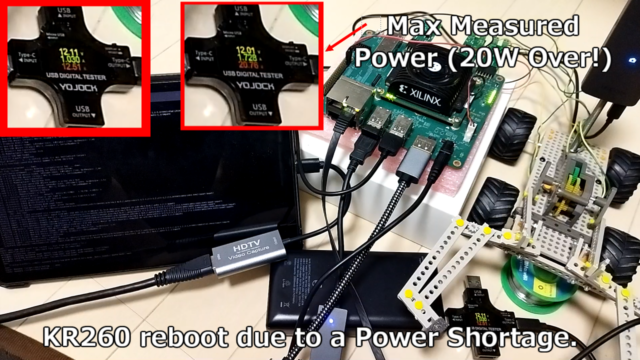
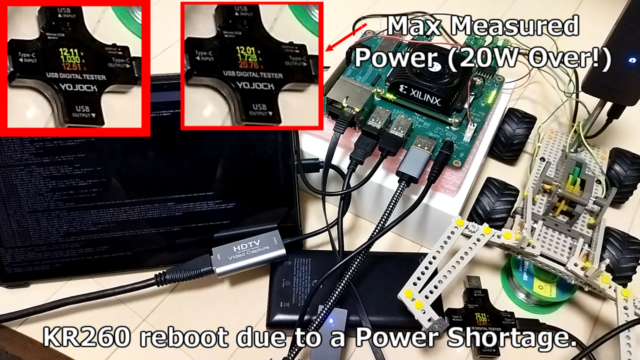
消費電力の合計を積み上げると26.7Wとなり、バッテリー20Wの容量を超えていました。
プログラム起動時に電力不足でRebootするのも当然でした。

冒頭でも紹介しましたが、テスト動画は下記です。
リブートが分かりやすいように、タブレット(ディスプレイ)と一緒にテストしています。
KR260に電源を入れて、Ubuntuは立ち上がっている状態です。

PDの20W(12V_1.67A)対応のモバイルバッテリーを使用しています。
USBチェッカーを接続して消費電力が分かるようにしています。
動画では左上の画面に表示させています。電圧(V)・電流(A)・電力(W)が確認できます。
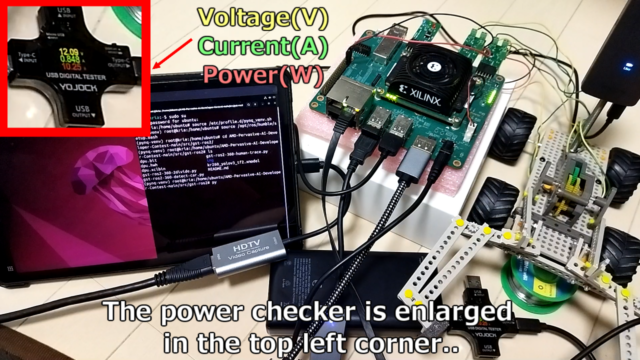
ロボットカーのプログラム起動時に20Wを超えてRebootする動作が確認出来ました。
KR260のスターターキット同梱のACアダプタ(36W)では問題無し
KR260のスターターキット付属品であるACアダプタ(36W_12V3A)では、問題なく動作します。
消費電力見積りの26.7Wを十分に超えています。
まとめ
バッテリーからKR260のロボットを動かそうとすると、起動時に電力不足が発生しました。
市販のPD対応のモバイルバッテリー(20W)を使いました。
実際の消費電力を積み上げて、どれぐらい不足していたのか確認してみました。
今回のKR260で実施した内容は、下記記事で紹介したテストの一部です。



コメント