Nordicの評価ボードでEdge Impulseを試してみました。
「nRF5340-DK」および「nRF54L15-DK」を使用しています。
モーションを検出するEdgeAI推論をテストした内容を紹介します。
Nordicの評価ボードでEdge Impulseを試してみた
Nordicの評価ボードでEdge Impulseを試してみました。
「nRF5340-DK」および「nRF54L15-DK」を使用しています。
実際のデモ動画が下記となっています。
mRF54L15-DKのボードでのテスト動画です。
mRF5340-DKのボードでのテスト動画です。
モーションを検出するEdgeAI推論をテストした内容を紹介します。
GitHub
プログラムのGitHubのリンク先は下記となっています。
Nordic の評価ボード「nRF5340-DK」および「nRF54L15-DK」を使用します。
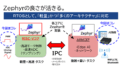
加速度センサ(MPU6050)のデータからモーションを検出するEdgeAI推論を動かします。
AIモデルの作成には Edge Impulse を使用し、作成したモデルをC++ライブラリとしてエクスポートして、nRF Connect SDK (NCS) 環境でビルドします。
用意するもの
- 開発ボード:
- Nordic Semiconductor nRF5340-DK
- Nordic Semiconductor nRF54L15-DK
- センサ:
- InvenSense MPU6050 (加速度/ジャイロセンサモジュール)
- ソフトウェア環境:
- nRF Connect SDK (NCS)
- Edge Impulse アカウント
1. Edge Impulseでモデルを作成する
まずは推論モデルを用意する必要があります。
このプロジェクトでは、Edge Impulseで作成したモデルを各自でダウンロードして使用する仕組みになっています。
- Edge Impulse で新規プロジェクトを作成します。
- 加速度センサのデータを収集し、学習させます(「Spectral Analysis」や「Classification」ブロックなどを使用)。
- 学習が完了したら、「Deployment」タブから C++ library を選択してビルドします。
- ダウンロードしたzipファイルを解凍し、以下のフォルダをプロジェクトのルートディレクトリに配置します。
edge-impulse-sdkmodel-parameterstflite-model
2. 配線 (Wiring)
センサと開発ボードを接続します。今回はI2C接続を使用します。
Device Tree Overlay (nrf***dk_nrf***_cpuapp.overlay) の設定に基づき、以下のピンに接続します。
| MPU6050 Pin | nRF***-DK Pin | 備考 |
|---|---|---|
| VCC | VDD (3.3V) | |
| GND | GND | |
| SDA | P1.11 | I2C1 SDA |
| SCL | P1.12 | I2C1 SCL |
3. ビルドと書き込み
nRF Connect SDK環境でビルドを行います。
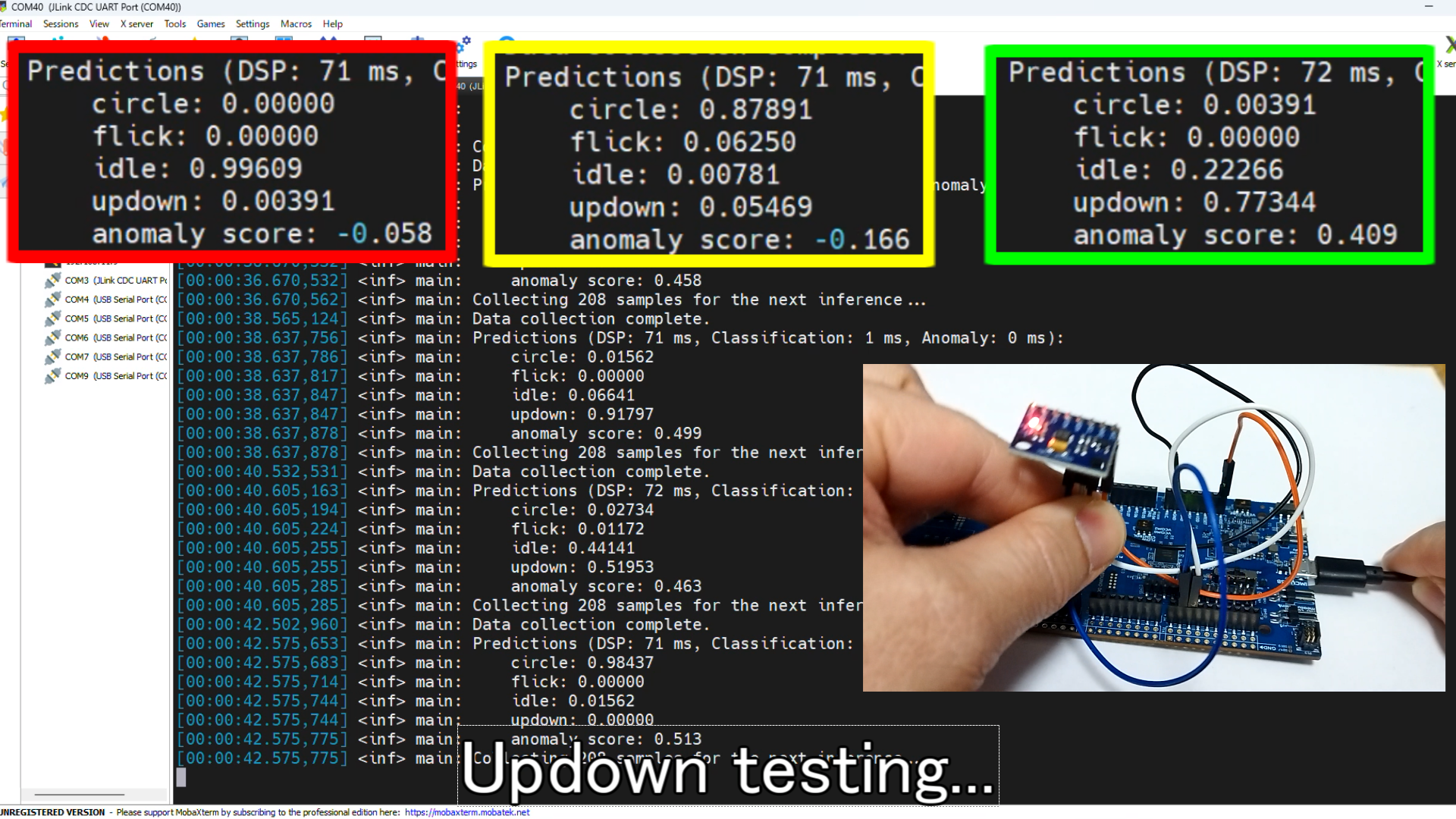
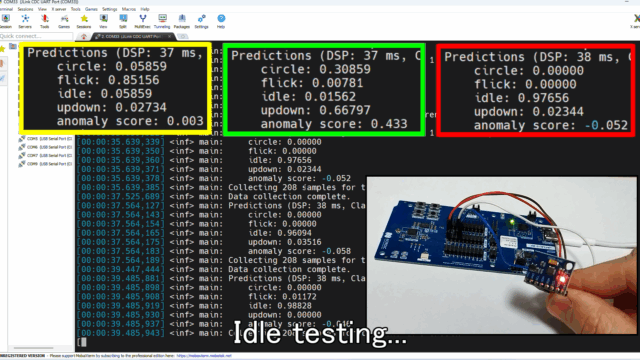
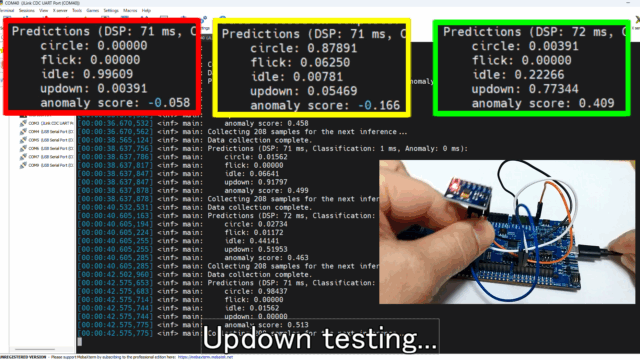
最後にidle、flick、updownなどのモーションテストをしてみます。
まとめ
これで、エッジデバイス上でリアルタイムに加速度データを処理し、AI推論を実行する環境が整いました。
モーション認識やジェスチャー検知など、様々なアプリケーションに応用できそうです。
コメント