モータドライバの回路を自作して、基板作成しました。
ICはDRV8833です。2chのDCモータを正転・反転制御する基板です。
回路図からアートワークまで作成した旨を紹介します。
モータドライバの回路を自作してみる(DCモータ編)
モータドライバの回路を自作して、基板を2枚作成しました。
ICはDRV8833です。2chのDCモータを正転・反転制御する基板です。
1枚目は直接ドライバICを実装する基板です。
2枚目は所持しているDRV8833の評価ボードを取り付けられる中継基板です。
作成した回路図やアートワークについて簡単に紹介します。
KiCadでの回路図・アートワーク作成
回路図とアートワークの作成に関してはKiCadで実施しています。
下記記事で簡単なLチカ基板で手順を紹介しています。
PCBGOGOへのガーバーデータをKiCadから作成したメモ
DRV8833のモータドライバICを選んだ理由
今回、TI製のDRV8833のモータドライバICを使いました。
メーカのデータシートのリンクは下記です。推奨の回路図・AWに従っています。
https://www.ti.com/product/ja-jp/DRV8833
ICを選んだ理由は、モータ電圧範囲が3SV~10.8Vと広いためです。
趣味用の工作に丁度よく、また汎用のICで既に多くの評価ボードがあります。
Amazonなどでも5個入りで1000円以下で簡単に購入できます。
筆者も所持していて、モータの動作テストなどに使っています。
下記記事で(最初に動かなかったトラブル含めて)動作テストした旨を紹介しています。

実際にラズパイから制御したPythonのプログラムも下記記事で紹介しています。
モータドライバでDCの正転・反転を試してみる(DRV8833編)
ICは同じですが、コネクタ周辺を変更して回路を自作してみることにしました。
モータ・電源のコネクタは汎用の2.54㎜ピッチの端子台です。
入力信号のコネクタも汎用の2.54ピッチのピンヘッダー・ソケットを使います。
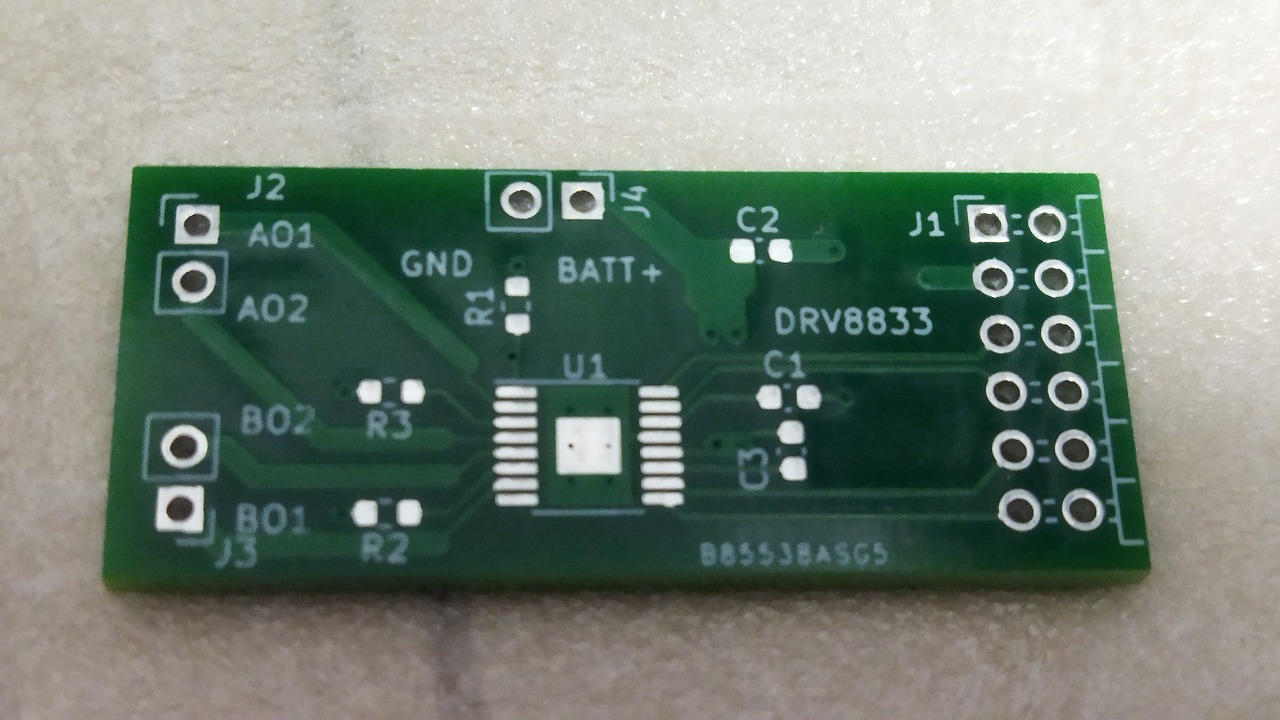
DRV8833を直接実装する基板
非常にシンプルな基板です。回路図は下記イメージです。
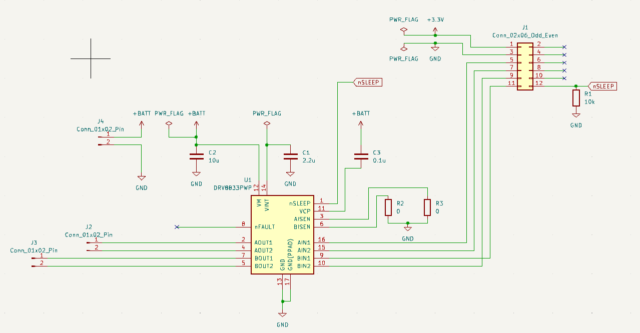
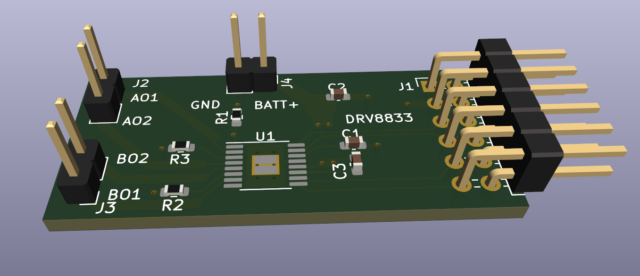
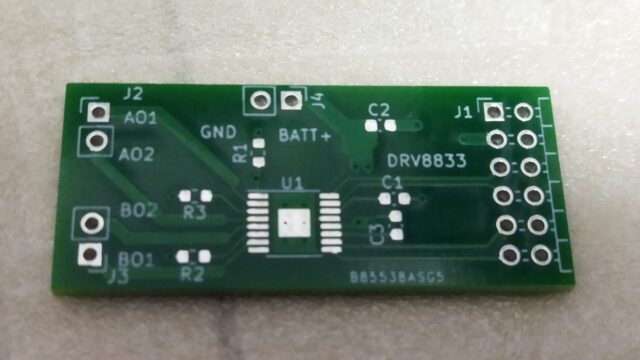
アートワークのイメージは下記です。両面2層の基板です。
フットプリントはKiCadに全てデフォルトでインストールされているものを使っています。
IC裏のVIA穴だけ0.2mmでしたので、0.3㎜に変更しています。(0.2㎜使うと高いため)
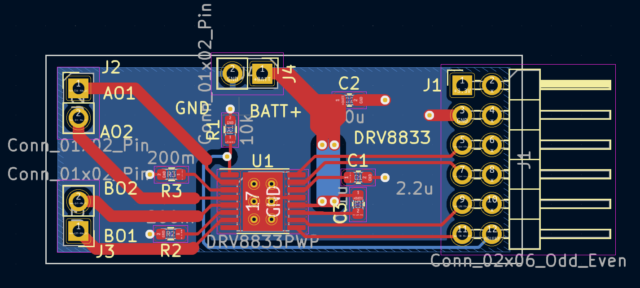
フットプリントは下記を使っています。
- Package_SO:HTSSOP-16-1EP_4.4x5mm_P0.65mm_EP3.4x5mm_Mask2.46x2.31mm_ThermalVias
- Capacitor_SMD:C_0603_1608Metric
- Resistor_SMD:R_0603_1608Metric
- Connector_PinHeader_2.54mm:PinHeader_2x06_P2.54mm_Horizontal
- Connector_PinHeader_2.54mm:PinHeader_1x02_P2.54mm_Vertical
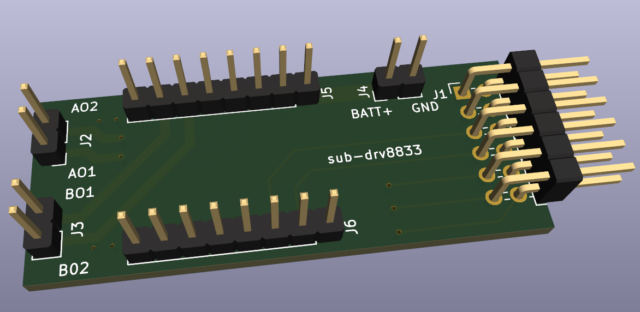
DRV8833の評価ボードを中継する基板
非常にシンプルな基板です。回路図は下記イメージです。
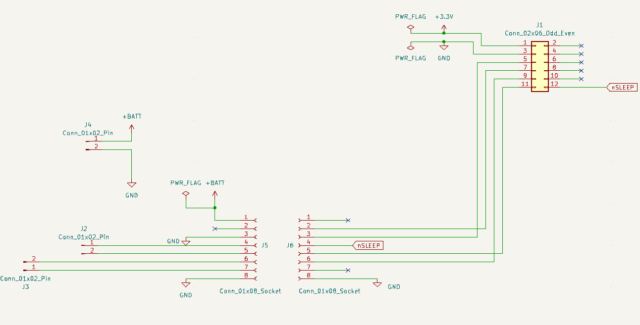
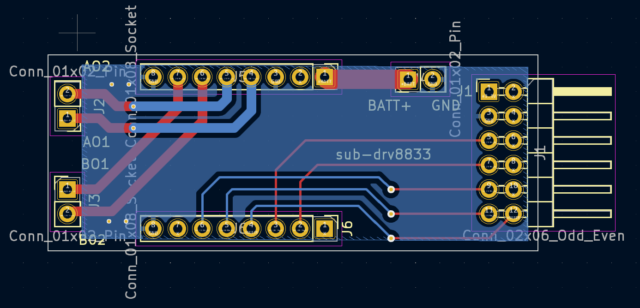
アートワークのイメージは下記です。両面2層の基板です。
元々ある評価ボードを中継するだけの基板のため、非常にシンプルです。
使ったフットプリントは下記です。
- Connector_PinHeader_2.54mm:PinHeader_2x06_P2.54mm_Horizontal
- Connector_PinHeader_2.54mm:PinHeader_1x02_P2.54mm_Vertical
- Connector_PinHeader_2.54mm:PinHeader_1x08_P2.54mm_Vertical
基板発注はPCBGOGO
基板はPCBGOGOで作りました。
デフォルト設定で、基板サイズだけ入力して発注しました。
発注から約1週間で問題なく手元に到着しました。

もし新規の場合、PCBGOGOで発注するとクーポンが使えてお得です。

筆者も1回目は多いに安く作成させていただきました。下記記事で紹介しています。

部品実装・動作テストに関しては、別の記事で紹介したいと思います。
まとめ
モータドライバの回路を自作して、基板作成しました。
ICはDRV8833です。2chのDCモータを正転・反転制御する基板です。
回路図からアートワークまで作成した旨を紹介させていただきました。
是非、モータドライバ回路を自作に興味ある方は試してみてください。
実際にステッピングモータを動作させた記事は下記となっています。
ステッピングモータを自作のドライバ回路とプログラムで動かしてみた

コメント