海外のAMDのハードウェア(FPGA)のコンテストに参加していました。
最終候補者(Finalist)に選ばれた際に、Web会議にて英語のプレゼン・レビューしました。
レビューで失敗したことや、良いフィードバックもらえた内容を紹介します。
海外のハードウェアのコンテストで英語のプレゼンをした話
おそらく海外のハードウェア(FPGA)のコンテストに参加した人自体が少ないです。
また海外関係者への英語でのプレゼン・QA内容も貴重と思い、ブログ記事としました。
参加したAMDのコンテストの詳細に関しては下記記事で紹介しています。

また、アメリカのサンフランシスコでの表彰式に関しても下記記事で紹介しています
AMDの開発者向けイベントのAdvancing AIに参加してきた

コンテストのFinalistとしての英語レビューは急に来る
今回のコンテストのスケジュールとしては下記内容でした。
(元々、コンテストの概要には特にレビューがあることは記載がありませんでした。)
2024年7月頃にプロジェクトを提出して、9月中旬頃に急にAMDの方から連絡が来ました。
・2024/2…評価ボードの申請期限(英語のWebテスト+応募のAbstract提出)
・2024/3…評価ボードの当選発表
・2024/4…評価ボードが到着
・2024/7…プロジェクトの提出期限
・2024/9…最終候補者(Finalist)を選出 + AMD関係者にレビュー
・2024/10…開発者向けイベント「Advancing AI 」で表彰
最終候補者(Finalist)に残った旨と、Webで関係者に英語のレビューする必要がある旨です。
レビューするにも資料が必要ですので急ぎで仕上げて、海外のWeb会議に挑みました。
ほぼ徹夜で作成して、アメリカだと午後、日本で夜明け頃にZoomでレビューしました。
筆者の英語のレベル
正直、英語の能力は低いです。
仕事で海外出張行って、何とか課題クリア?して帰ってくるのにヒーヒー言っているレベルです。
英語のレビューの資料
コンテストで提出したプロジェクトのドキュメントは既にありました。
360°Object Detection Robot Car
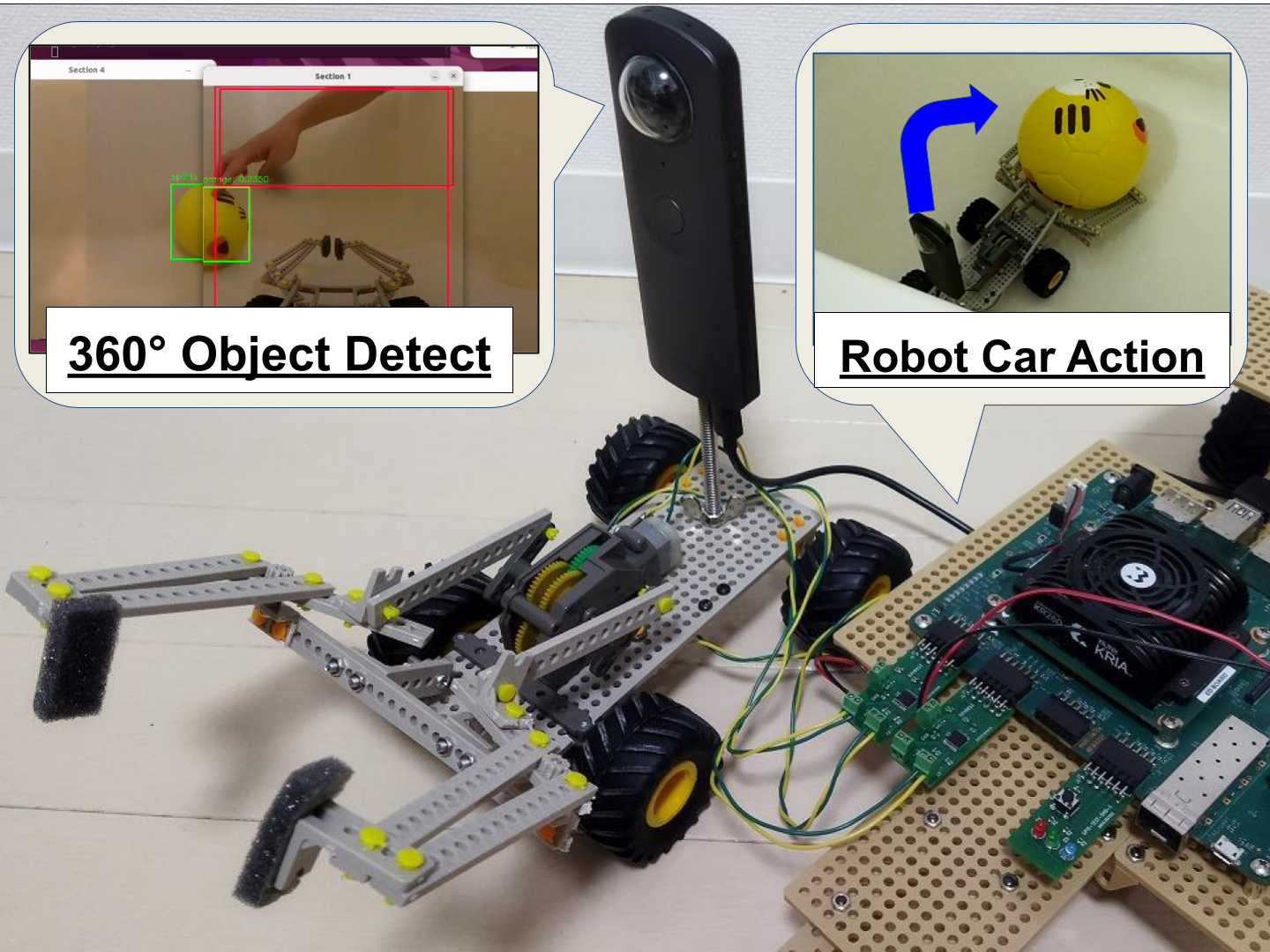
上記をまとめ直してレビュー資料にしました。
30分ほどのレビュー時間で、15分ほどプレゼン+15分のQAの時間です
何とか時間内で説明できる資料を作りました。
プレゼンは何とかなったつもりです。と思いたい…。
英語のQA
説明するだけなら楽ですが、急にきた英語に質問を的確に返すのは難しいです。
レビュー後のQAで8個ぐらい質問が来ました。珍しい情報なので紹介したいと思います。
ミスも沢山ありましたが、拙い英語で返したつもりです。
ただWeb会議の参加者(AMDの関係者)も優しく、内容も普通・基本的な質問でした。
(自分が聞き取れなかったら、何回か言い換えて説明してくれました)
あくまで理解度とか本当にコンテストに取り組んだのか、確認していたのだと思います。
*記憶だよりで書き起こしているので、英語は間違いあるかもしれません。
そこはご了承ください。
もちろん英語での回答をしましたが、そこは拙い英語でしたので記載は省略しています。
物体検出や、操作性のテストをどのように品質テストする?
プレゼン後、初手でこの質問が来ました。当たり前の質問だけど厳しい…。
What methods do you use for quality testing, such as object detection and usability testing?
Q:どのようにしてこのプロジェクトのさまざまな部分の品質レベルを決定するのでしょうか?例えば、物体検出や、操作性のテストなどどのように品質テストする?
自分のプロジェクトでは(雑な物体検出で)色々な手法をテストしただけでした。
素直に下記回答をしました。
AMD関係者には、初見で検証・評価まで出来ていないことがバレていました。
プロジェクトの改善点は?
2つ目は優しい質問でした。
Q:プロジェクトの改善点は何かありますか
次は想定していた(よくある)質問が来ました。
用意していた(というよりプロジェクトでも既に記載していた)、下記回答をしました。
ハードウェアエンコーダを使った画像転送の高速化
CPU処理の箇所をDPU処理にして高速化
なぜ、このプロジェクトにFPGAが必要か?
3つ目も良くある、今回のFPGAのコンテストならではの質問でした。
Couldn’t we have just used something like a Raspberry Pi?
Q:なぜこのプロジェクトにFPGA+SoCが必要なのでしょうか?
例えば、ラズベリーパイなどでは構築することはできなかったのでしょうか?
これも、想定していた(よくある)質問が来ました。
今回のコンテストのテーマであるDPUを使った高速化の旨を説明しました。
ラズベリーパイだとCPUだけなので物体検出速度が厳しかったです。
(本当はラズパイでもある程度動くの知っているけど、テンプレの回答を返しておく)
どんなアプリケーションで使われる想定?
4つ目の質問もよくある質問でした。
Q:実際への応用例としてどんなケースが考えられますか?
これも良くある質問で、よくある自動車のアプリケーションと答えておいた。
Lidar情報が無く、カメラの情報だけでは、難しいと思うけど…。
今回のFPGAはどのように合成したか
5つ目の質問は自分のプロジェクトの特徴・工夫した箇所を聞かれました。
Q:どのようにDPUとGPIOとPWMをまとめて合成しましたか?
他の人のプロジェクトを見ても、個々にはDPUやGPIO,PWMを使っていました。
ただ自分みたいに一つでまとめて合成した例は少なかったので、ここはしっかり聞かれました。
AMDの関係者からは「VivadoのみでDPUを入れることができるよ」とはコメント貰いました。
昔試したが上手くできなかった。もっと優しい手順書くれと言いたいが、黙っておいた。
使ったYOLOXのモデルはどのように作った?コンパイルした?
6つ目の質問は、しっかり自分でコンテストに取り組んだかを問われた質問でした。
Q:YOLOXのモデルをどのように作った?コンパイルしました?
今回YOLOXはVitis AIで提供されているモデルをそのまま使っていました。
ファインチューニングとかは?とも聞かれたが、そこまでは実施していませんでした。
ロボットはどのように制御した?
7つ目の質問も「AMD関係者の方は本当に鋭いな~」と思いながら回答しました。
Q:ロボットコントロールはどのようにしましたか?
デモではある程度ロボットをコントロールしているように見せました。
ただ大体のデモはゲームコントローラーから手動制御でした。
自動追従するテストも何回か試した旨含めて説明しました。
但し、画像認識を得た情報を元に自動追跡・追従するデモも何回かは試しています。
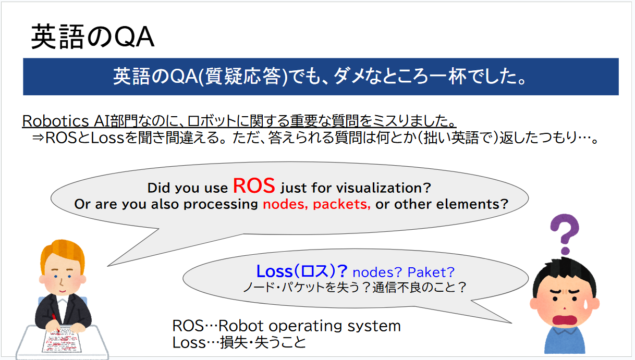
ROS2は可視化に使っただけ?
8つ目の質問が一番失敗した箇所です。重要の箇所だったので悔やまれます。
Or are you also processing nodes, packets, or other elements?
Q:ROS2では可視化しただけ?ノードやパケットなど他には処理していますか?
ROSとLossを聞き間違えて、通信不良への質問かと勘違いして全く答えれなかったです。
Robotics AI部門なのに、ロボットに関する重要な質問をミスりました。
ごめんなさい。ちょっとわからないです。
まとめ
海外のAMDのハードウェアコンテストでWeb会議にて英語のプレゼン・レビューしました。
レビューで失敗したことや、良いフィードバックもらえた内容を紹介しました。
回答に失敗した箇所も、拙い英語で回答した箇所も多くあります。
でも振り返ってみると、AMD関係者に直接レビューするという貴重な経験でした。
ぜひ皆様も海外のコンテストに参加してみてください。
今回の内容は、下記コンテストに参加した記事の一部です。


コメント